Delta D25886 User Manual Page 59
- Page / 339
- Table of contents
- TROUBLESHOOTING
- BOOKMARKS
- DVP-MC Bus-Type 1
- Multi-Axis Motion Controller 1
- Operating Manual 1
- Content 2
- Overview of DVP10MC11T 7
- 2. System Function 10
- 3. System Installation 34
- 4.1. Instruction Table 42
- 4.2. Axis Status 46
- 4.3. Instruction Usage 47
- Instruction format 47
- Data type list 48
- 4.4.1. MC_MoveAbsolute 49
- Program Example (1) 52
- Program Example (2) 53
- 4.4.2. MC_MoveRelative 55
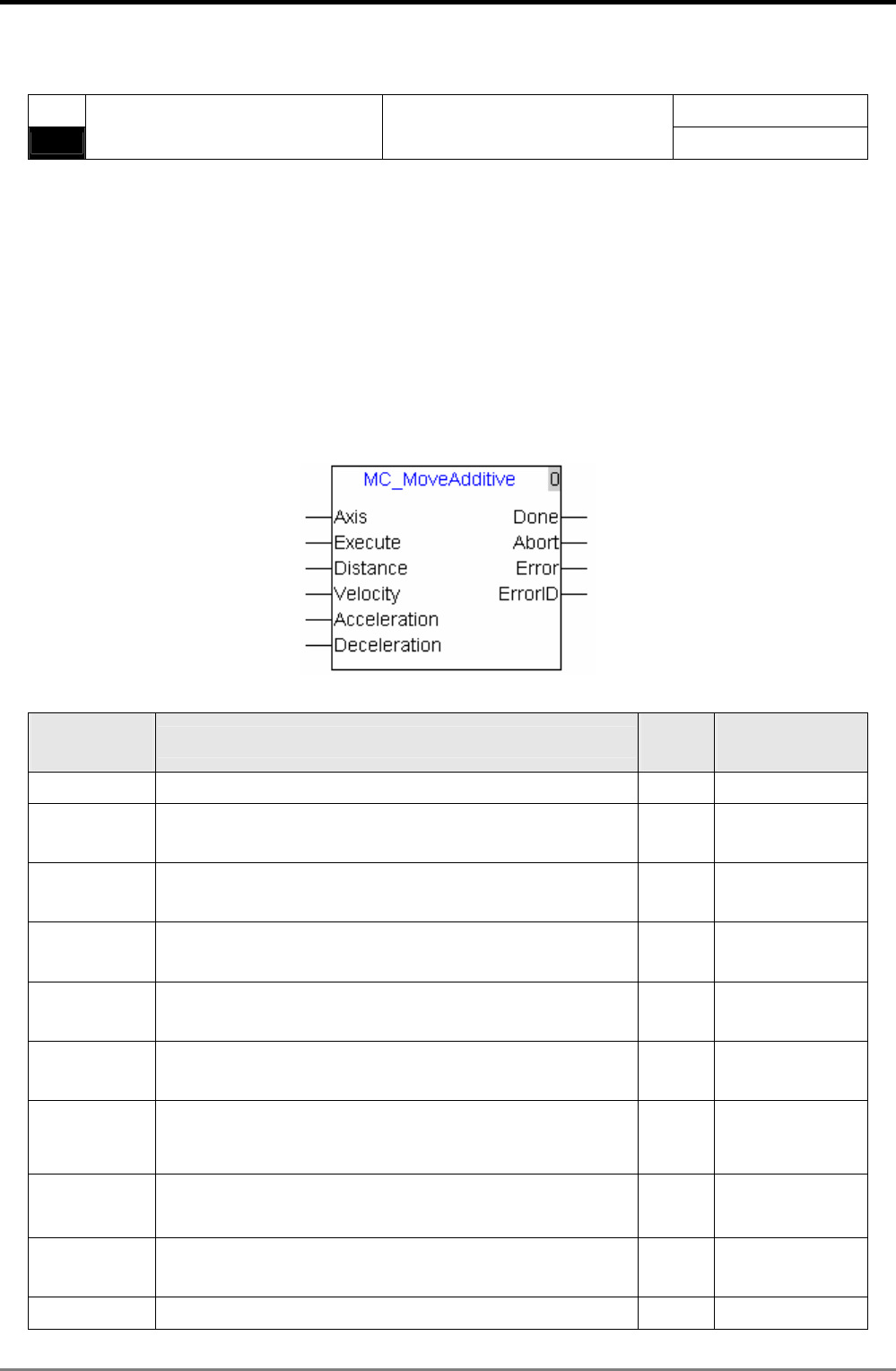
- 4.4.3. MC_MoveAdditive 59
- 4.4.4. MC_MoveSuperImposed 63
- 4.4.5. MC_MoveVelocity 68
- 4.4.6. MC_Stop 71
- 4.4.7. MC_PassiveHome 74
- Example 75
- 4.4.8. MC_Power 77
- 4.4.9. MC_Reset 78
- Exmaple: 79
- 4.4.10. MC_ReadStatus 80
- 4.4.12. MC_ReadAxisError 82
- 4.4.13. DMC_ReadParameter 83
- 4.4.14. DMC_WriteParameter 84
- 4.4.15. DMC_SetTorque 85
- Program Example 86
- 4.5.1. MC_CamTableSelect 87
- 4.5.2. MC_CamIn 88
- = 0, slave position is 101
- 0, slave offset = 0 102
- Master Positio 102
- offset = 40, slave position 103
- Electronic cam example: 104
- Position 105
- 4.5.3. MC_CamOut 107
- Program Example: 108
- 4.5.4. DMC_CamSet 110
- Acceleration 112
- 4.5.5. MC_GearIn 114
- . UINT D 115
- 4.5.7. MC_Phasing 118
- Sequence Diagram 120
- 4.5.8. DMC_CapturePosition 121
- 4.5.9. DMC_VirtualAxis 127
- 4.5.10. DMC_ExternalMaster 129
- 4.6. Logical Instruction 131
- 4.6.3. ADD_R 132
- 4.6.4. SUB 132
- 4.6.5. SUB_DI 133
- 4.6.6. SUB_R 133
- 4.6.7. MUL 134
- 4.6.8. MUL_DI 134
- 4.6.9. MUL_R 135
- 4.6.10. DIV 135
- 4.6.11. DIV_DI 136
- 4.6.12. DIV_R 136
- 4.6.13. AND 137
- 4.6.14. OR 137
- 4.6.15. XOR 138
- 4.6.16. NOT 138
- 4.6.17. CTU 139
- Program example: 140
- 4.6.18. CTD 141
- 4.6.19. CTUD 143
- 4.6.20. TON_s 145
- 4.6.21. TOF_s 147
- 4.6.22. TONR_s 149
- 4.6.23. TON_ms 151
- 4.6.24. TOF_ms 152
- 4.6.25. TONR_ms 153
- 4.6.26. CMP 154
- 4.6.27. CMP_DI 155
- 4.6.28. CMP_R 156
- 4.6.30. MOV_DI 158
- 4.6.31. MOV_R 158
- 4.6.34. MOVF_R 161
- Program example : 162
- 4.6.36. MOV_BW 163
- 4.6.38. ZCP 165
- 4.6.39. ZCP_DI 166
- 4.6.40. ZCP_R 167
- 168
- 4.6.43. OUT 169
- 4.6.44. R_Trig 169
- 4.6.46. ZRSTM 172
- 4.6.47. ZRSTD 173
- 4.6.48. SQRT_R 174
- 4.6.49. MOD 174
- 4.6.50. MOD_DI 175
- 4.6.51. MOD_R 175
- 4.6.52. Real_To_Int 176
- 4.6.53. Real_To_DInt 176
- 4.6.54. Int_To_Real 177
- 4.6.55. DInt_To_Real 177
- Example 1: 178
- Example 2: 179
- Example 3: 179
- 4.6.58. Offset _R 182
- 4.7. Application Instruction 183
- 4.7.2. Rotary Cut Parameters 184
- Short material cutting 185
- Equal length cutting 185
- The entry curve 187
- The end curve 188
- 4.7.5.1 189
- 4.7.5.2. APF_RotaryCut_In 191
- 4.7.5.3. APF_RotaryCut_Out 192
- Explanation of areas 197
- Steps for flying shear 197
- Function feature 197
- Shear axis 198
- Sync area 203
- 4.8.1. G Code Input Format 206
- Center of a circle 222
- Start point 222
- Terminal point 222
- ()200,200 223
- Start point Start point 226
- Instruction example 1: 232
- Instruction example 2: 232
- Instruction example: 232
- 4.8.4. DMC_NC 233
- Program example 1: 235
- Program example 2: 236
- ¾ Program: 237
- ¾ Steps: 237
- 5.Troubleshooting 258
- 5. Troubleshooting 259
- Appendix A 264
- Appendix B 287
- Appendix C 301
- Appendix D 333
- Appendix E 338
Related products and manuals for Air compressors Delta D25886

 (72 pages)
(72 pages) (24 pages)
(24 pages)
© 2020, manymanuals.com. All rights reserved. | 1.423 s |
 Manymanuals.com
Manymanuals.com
 Manymanuals.de
Manymanuals.de
 Manymanuals.fr
Manymanuals.fr
 Manymanuals.it
Manymanuals.it
 Manymanuals.pl
Manymanuals.pl
 Manymanuals.cz
Manymanuals.cz
 Manymanuals.es
Manymanuals.es
 Manymanuals-pt.com
Manymanuals-pt.com
Comments to this Manuals