Delta PG-40 Specifications Page 105
- Page / 179
- Table of contents
- BOOKMARKS
- Preface 4
- WARNING 4
- TABLE OF CONTENTS 6
- 1.2 Model Explanation: 10
- 007B23A0 11
- Air Flow 13
- CHAPTER 3 WIRING 14
- 3.1 Basic Wiring Diagram 15
- 0~10VDC/2mA 16
- 3.2 External Wiring 19
- 3.3 Terminal Explanations 20
- 3.5 Main Circuit Wiring 22
- R/L1 S/L2 T/L3 23
- 3.6 Wiring Notes: 29
- VFD-PU01 33
- To shift data 35
- To modify data 35
- (1), (2) Disabling S curve 45
- (3), (4) Enabling S curve 45
- Stops according 48
- to deceleration 48
- Accel time 1 64
- Output Frequency 73
- ( 7.N.2) 91
- ( 7.E.1) 91
- VFD-B Series 100
- #define THR 0x0000 101
- RS485 BUS 103
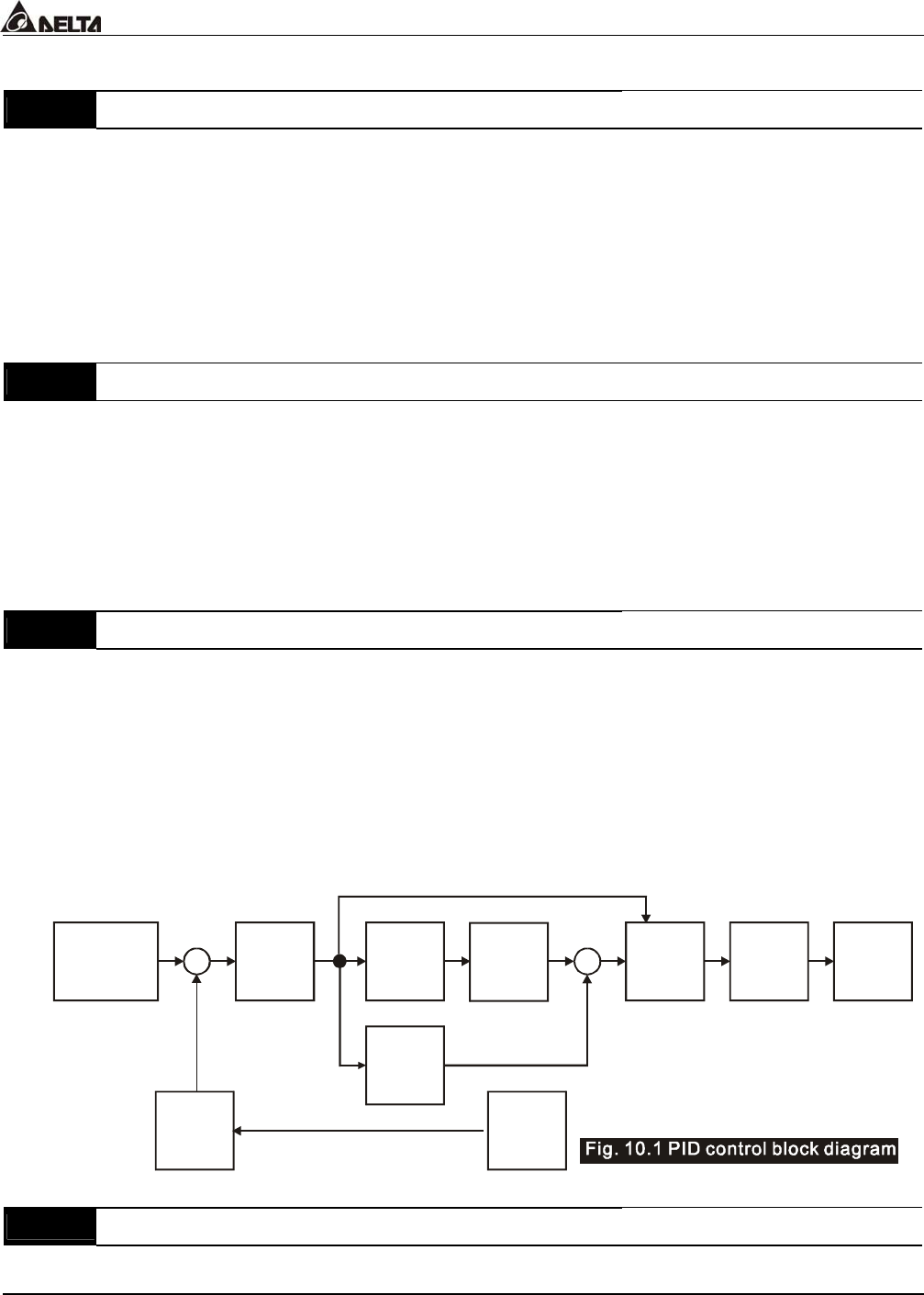
- Setpoint 105
- Frequency 107
- Factory 128
- Parameters 132
- SPECIFICATIONS 140
- Electrical Characteristics 142
- ACCESSORIES 144
- Fuse Specification Chart 145
- Order P/N: RF110B43CA 153
- Order P/N: 10TDT1W4C 154
- Order P/N: 26TDT1W4C 154
- Order P/N: 50TDS4W4C 155
- Order P/N: 100TDS84C 155
- Order P/N: 200TDDS84C 156
- Order P/N: 150TDS84C 156
- Order P/N: 180TDS84C 157
- Order P/N: 20TDT1W4D 157
- Order P/N: 26TDT1W4B4 158
- Section 1 Installation 159
- A, A, B, B 162
- 41615141311 164
- 166
- DIMENSIONS 168
- UNIT : mm(inch) 171
- R6.5[0.25] 174
- Unit: mm (inches) 176
- EC Declaration of Conformity 178
- Amendment Directive 93/68/EEC 178
Related products and manuals for Water heaters & boilers Delta PG-40
 (48 pages)
(48 pages)© 2020, manymanuals.com. All rights reserved. | 8.061 s |
 Manymanuals.com
Manymanuals.com
 Manymanuals.de
Manymanuals.de
 Manymanuals.fr
Manymanuals.fr
 Manymanuals.it
Manymanuals.it
 Manymanuals.pl
Manymanuals.pl
 Manymanuals.cz
Manymanuals.cz
 Manymanuals.es
Manymanuals.es
 Manymanuals-pt.com
Manymanuals-pt.com
Comments to this Manuals